




Исследователи из Познанского технологического университета создают устройство, имитирующее движения рук для промышленности
Роботизированная рука, которая заменит человеческую индустрию и будет очень точно имитировать движение человеческой руки - это не только видение будущего, но и цель ученых из Института автоматического управления и инженерии информации в Познанском технологическом университете. Работы над изобретением уже ведутся. Следующий этап исследований будет финансироваться Национальным центром исследований и разработок в рамках программы «Лидер VII». Руководителем проекта «Восприятие и контроль в задачах роботизированной манипуляции с гибкими объектами» является доктор Кшиштоф Валас. Его реализуют Томаш Маньковский и Якуб Томчинский - концепция создания робота-робота появилась уже на этапе написания магистерской диссертации. В то время он работал в команде из трех человек (однако один из его членов выбрал непрофессиональную карьеру). Теперь это должно быть продолжено. Проект пишется на ближайшие три года. Его эффект должен быть устройством с ловкостью, подобной человеческой руке.
Увидеть больше
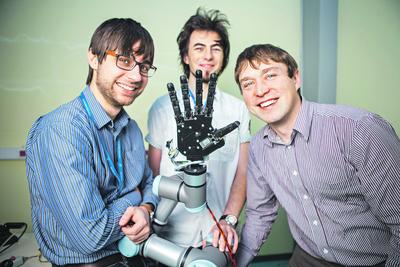
НАУКА И ТЕХНОЛОГИЯ: Цель проекта, осуществляемого в Познанском технологическом университете, - создать прототип руки робота с ловкостью, близкой к человеческой. Способен захватывать и манипулировать повседневными предметами. Устройство может быть использовано, среди прочего в промышленности, - объясняет Якуб Томчинский (на снимке посередине), который работает над проектом вместе с Томашем Манковским (слева) и Кшиштофом Валасом. WR
На кончиках ваших пальцев
В первой идее команда попыталась столкнуться с концепцией создания ручного протеза, простого и дешевого в производстве.
- Создан несложный механический захват - манипулятор и электромиографический интерфейс, позволяющий управлять устройством с помощью сигналов, генерируемых мышцами руки, - объясняет Якуб Томчинский. Теперь команда идет новым курсом. Он хочет, чтобы устройство использовалось в промышленности. Роботизированная рука должна выполнять действия, которые в настоящее время находятся вне досягаемости машин и все же должны быть переданы на аутсорсинг людям. Пример: переноска кабельных пучков.
- В будущем мы хотели бы заменить этот тип задач автоматизированной позицией на производственной линии. Готовое устройство может само проанализировать, как данный элемент, такой как резиновая трубка или кабель, будет вести себя во время сборки. Это позволило бы автоматически соединять гибкие изгибающиеся детали и оптимизировать выполнение отдельных производственных задач, - объясняет Якуб Томчинский. Томаш Маньковский уверяет, что решения могут быть использованы в основном в следующих отраслях: автомобилестроение, автомобилестроение, а также производители бытовой электроники или бытовой техники / электроники.
Дефектное оборудование
Усовершенствовав устройство, исследователи извлекут выгоду из предыдущего опыта. Для продолжения, например, они намерены опустить устройство.
- Манипулятор автоматически адаптируется к объекту, который он захватывает, его форме, размерам или гибкости, - говорит Якуб Томчинский.
- Нам нужно работать над управлением устройством, чтобы точно выполнять поставленные перед ним задачи. И нелегко «научить» машину манипулировать объектами, которые изменяют свою форму под давлением. Мы проведем исследование, которое позволит вам усовершенствовать захват. Это будет необходимо, среди прочего разработка соответствующих алгоритмов на основе системы зрения. Они проанализируют свойства самого объекта, а также его местоположение - первичное и конечное, куда он должен быть перемещен или включен, - добавляет Томаш Манковский.
Роботизированная поддержка
Чтобы иметь возможность точно определить алгоритмы управления манипулятором, сами ученые достигли современных технологий. Их исследования будут поддерживаться роботом UR3 от Universal Robots, который был приобретен Познанским технологическим университетом. Это будет служить исследовательским целям. UR3 используется, с одной стороны, как рычаг, на котором была установлена рука, с другой стороны, как точный инструмент для измерения положения и ориентации объектов в пространстве и для калибровки датчиков, определяющих эти параметры.
- Благодаря тому, что роботу не нужно работать в щите, отделяющем его от людей [для этого нужно много роботов], вы можете взаимодействовать с ним естественным образом, что значительно сокращает время тестирования, - подчеркивает доктор Кшиштоф Валас. UR3 также будет предоставлен студентам Политехнического института. Это облегчит изучение робототехники и реализацию дальнейших инновационных проектов.
ОК ОК ПРАКТИКА
Плечом к плечу с роботом
ЛАВОЙ МУСИЛЕК, генеральный директор Universal Robots в регионе Центральной и Восточной Европы
К концу 2019 года в мире будет установлено более 1,4 миллиона новых промышленных роботов, и совместные роботы будут играть важную роль в развитии рынка автоматизации. В течение этого периода также произойдет прорыв в безопасном сотрудничестве между людьми и роботами, без использования защитных барьеров, - согласно World Robotics Report 2016, опубликованному Международной федерацией робототехники (IFR). Промышленные сектора, которые, согласно прогнозам IFR, будут принимать решения об инвестициях еще более быстрыми темпами. в приложениях, использующих совместные роботы, он включает в себя автомобилестроение, пластмассы, электроника, металлы и обработка. Их также можно использовать в лабораторных анализах и испытаниях, а также для контроля качества, например, в фармацевтической и химической промышленности. Совместная работа также доступна малым и средним предприятиям. Доступ к автоматизации в тех областях, где она ранее считалась слишком сложной и дорогой, может стать прорывом для производственных компаний. Тот факт, что сотрудничающим роботам не требуются выделенные защищенные рабочие места, характеризует их простое управление, которое заставляет компании все чаще использовать такие решения для автоматизации производства.
© ℗
Похожие
Правила для женщин. Обращаются ли мужчины и женщины одинаково по закону?... наилучшего вам (и мне, и чему! :)) по случаю нашего праздника! Пусть мы всегда сможем ладить с собой, решать самим и жить счастливо жизнью своей мечты. По случаю женского дня несколько избранных рецептов только для нас, женщин. Минимальный возраст для вступления в брак для мужчин и женщин Как правило, мы можем жениться после 18 лет. Это касается как мужчин, так и женщин. Однако не все знают, что есть исключение для женщин . А именно, если Рекламный офис - Ströer Group
Анджей Магдзяк - председатель правления, главный исполнительный директор Анджей Магдзяк, президент правления, главный исполнительный директор, рассказывает о работе рекламного офиса Ströer Group Мы являемся лидером самых популярных форматов наружной рекламы в Польше: фронтальная подсветка 18 кв. и передний свет 36 кв. В нашем единственном распоряжении также рекламные носители на станциях и в вагонах Обращаются ли мужчины и женщины одинаково по закону?